Qu’est-ce qu’un réseau de neurones ?
Un réseau de neurones (réseau neuronal ou réseau de neurones artificiels) est un modèle de transformation de données servant principalement à extraire des patrons (patterns) grâce à un apprentissage fait à partir d’un ensemble de données fournies en entrée (input data).
Les réseaux de neurones s’inspirent des réseaux de neurones biologiques de structure et de fonctionnement partiellement semblables. À l’instar des réseaux de neurones biologiques, un réseau de neurones artificiels est un algorithme informatique (ANN – Artificial Neural Network) constitué d’un ensemble d’unités liées entre elles (neurones) parmi lesquelles les informations sont propagées afin d’activer une fonction particulière à la suite de sa réponse.
L’intelligence artificielle réfère aux programmes informatiques pouvant mimer la capacité de discernement dont les êtres biologiques sont dotés. Tout comme les êtres vivants, ces programmes ont besoin d’être équipés d’une capacité d’apprentissage qui leur permettra d’améliorer leur performance au fur et à mesure qu’ils progressent dans leur apprentissage. Le but de l’apprentissage machine auquel ce concept fait allusion est de créer des modèles apprenants capables d’apprendre à exécuter des tâches spécifiques (classification d’objets, détection d’anomalies, etc.) en se basant généralement sur des observations historiques. En apprentissage machine, plusieurs approches permettent d’élaborer un modèle apprenant; les réseaux de neurones constituent une méthode de choix pour obtenir des modèles performants et efficaces.
Étude de cas
Pour mieux comprendre le fonctionnement des réseaux de neurones et son rapprochement avec la référence biologique, supposons la création d’un programme informatique pouvant identifier un véhicule automobile sur une image. Que ce soit dans un environnement réel ou à travers un écran, la plupart des humains reconnaîtront assez rapidement un véhicule lorsqu’il passe sous leurs yeux. Les sous-étapes du processus de reconnaissance d’un véhicule par un être humain ou par un algorithme sont sensiblement les mêmes :
| Processus de reconnaissance d’un véhicule automobile | ||
|---|---|---|
| Par l’être humain | Par un algorithme | |
|
Traitement des données en entrée
La première étape de la reconnaissance d’objet consiste tout simplement à être exposé à cet objet. |
Les yeux, en processus de captation continue, aperçoivent le véhicule et collectent un signal lumineux qui représente l’objet (le véhicule) pour l’envoyer au cortex visuel primaire sous la forme d’un signal électrochimique. | Comme un programme informatique n’a pas d’yeux, il est primordial de collecter l’image du véhicule sous un format numérique et de l’acheminer jusqu’au réseau de neurones artificiels qui sera responsable d’en analyser le contenu. |
|
Traitement des données à travers le réseau de neurones
Le temps qui s’écoule entre « apercevoir un véhicule » et « reconnaître que c’est un véhicule » est infiniment court. |
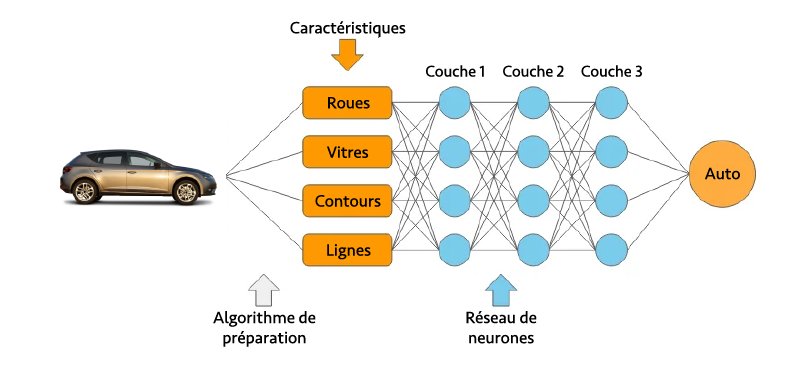
Cette tâche est exécutée quasi-instantanément. En réalité, qu’il s’agisse d’un réseau de neurones biologiques ou d’un réseau de neurones artificiels, l’accomplissement de cette tâche implique une séquence en plusieurs étapes. | Dans un réseau de neurones artificiels, les données en entrée (une matrice de valeurs numériques représentant une image de voiture) sont propagées à travers les différentes couches du réseau de neurones. Chacune de ces couches est responsable d’extraire des caractéristiques spécifiques à l’objet représenté (la voiture) et évoque un niveau d’abstraction. |
Supposons un réseau de neurones de cinq couches :
- Une couche d’entrée : comme il l’a été mentionné précédemment, cette couche est semblable à une porte d’entrée pour les données à traiter ;
- Une première couche (premier niveau d’abstraction) : les neurones de cette couche serviront à distinguer les contours et les lignes formant l’objet, un peu comme un être humain pour qui la perception des objets commence généralement par la distinction de la silhouette ;
- Une deuxième couche (deuxième niveau d’abstraction) : les caractéristiques extraites de la première couche seront propagées vers la deuxième couche qui en extraira d’autres caractéristiques visuelles de base (caractéristiques spatiales telles que la position, les couleurs, etc.) ;
- Une troisième couche (troisième niveau d’abstraction) : les caractéristiques extraites de la deuxième couche seront propagées vers la troisième couche qui en identifiera des caractéristiques distinctives s’appliquant à l’objet (les roues, les portes, les phares, etc.).
La couche de sortie : dans la reconnaissance d’objet, cette couche servira à fournir la réponse finale au réseau de neurones : « c’est bien une voiture ». Généralement, ce résultat se présente sous la forme d’un indice de probabilité qui induit une certitude quant à l’identité de l’objet en question (p. ex. « 0,89 : Voiture » signifie un niveau de certitude du réseau de neurones de 89 %).